제 품 소 개
X.M KOREA
제품소개




■ 제품 정보
| 구분 | 내용 |
| 명칭 | 자유 이동형 용접로봇 (XM-해리어 PRO) |
| 모델 | WMM-10iD/8LHG500 |
| 순중량 | 3880kg |
| 외형 사이즈 | 4200*1320*2360mm |
| 최소 회전 반지름 | 4800mm |
| 배터리 매개변수 | 48V, 140 Ah 리튬 배터리 |
| 배터리 수량 | 1 |
| 최대 안전 주행 속도 | 2.5km/h |
| 주행거리 | 2~3km (겨울) / 2~5km (여름) |
| 수평 용접 너비 | 3850mm |
| 수직 용접 높이 | 5000mm |
| 로봇 암(arm) | FANUC M-10iD / 8L |
| 제어기(컨트롤 캐비닛) | FANUC R-30iB Mate Plus |
| 용접기 | PANASONIC YD-500FT3 (380V 사용) |
| 냉각 방식 | 수냉식(부동액) |
■ 용접 방식
| 구분 | 내용 |
| 용접 방법 | 아르곤(80%) + 이산화탄소(20%) 戓이산화탄소 |
| 작업물 재질 | 탄소강 / 스테인리스강 |
| 용접 위치 | 수평 용접, 평면 용접, 수직 용접, 역 용접 |
| 용접봉 | 직경 Φ0.8-Φ1.6mm 솔리드 / FCAW |
| 토치(용접봉 노출 길이) | 10-20mm |
■ 제품 기능 소개
1. 자유 주행 기능을 통해 용접 작업 위치로 자유롭게 이동 가능합니다.
*고정형 및 레일형 로봇의 한계를 깬 이동식 설계로 작업 효율을 월등히 끌어올릴 수 있음
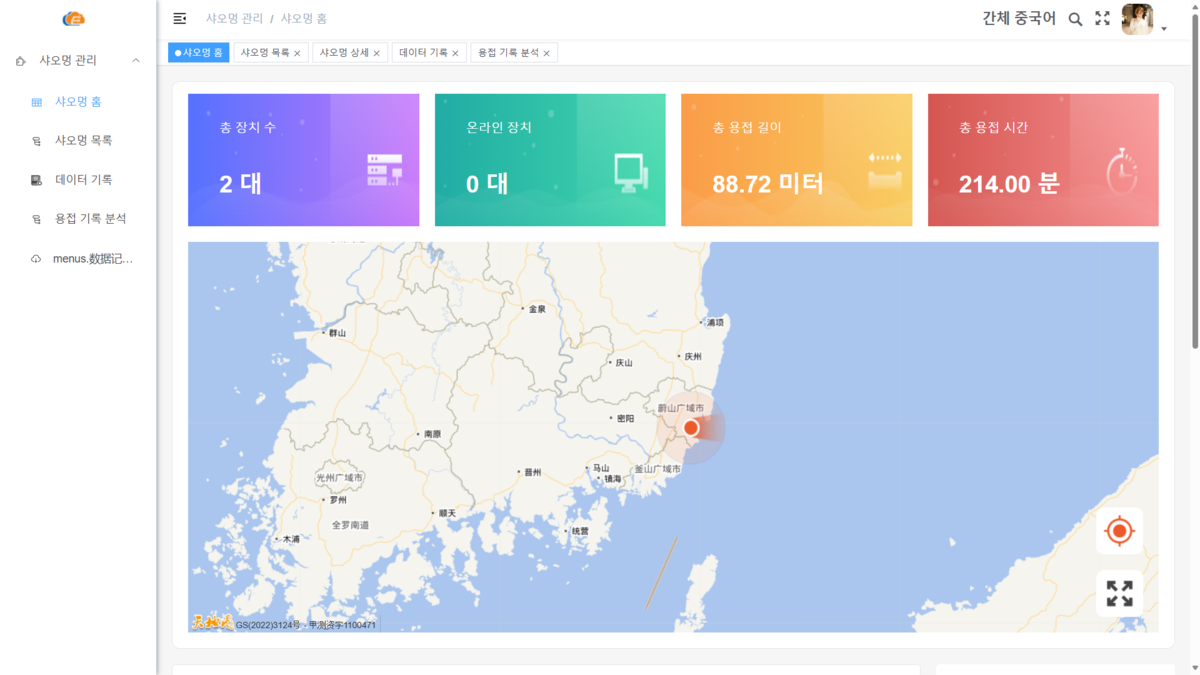
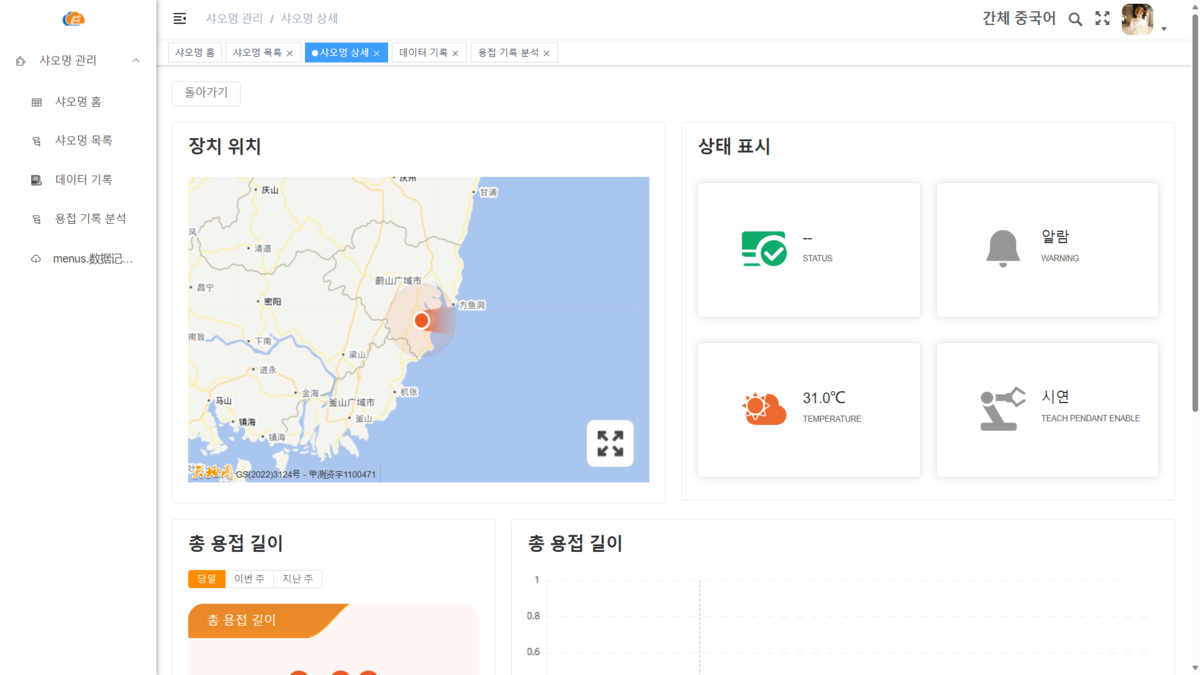
2. 실시간 모니터링 시스템으로 용접 과정을 실시간으로 모니터링하고, 스마트하게 감지할 수 있습니다.
*라우터 카드 삽입으로 PC, 모바일에서 작업시간과 작업량을 실시간 모니터링
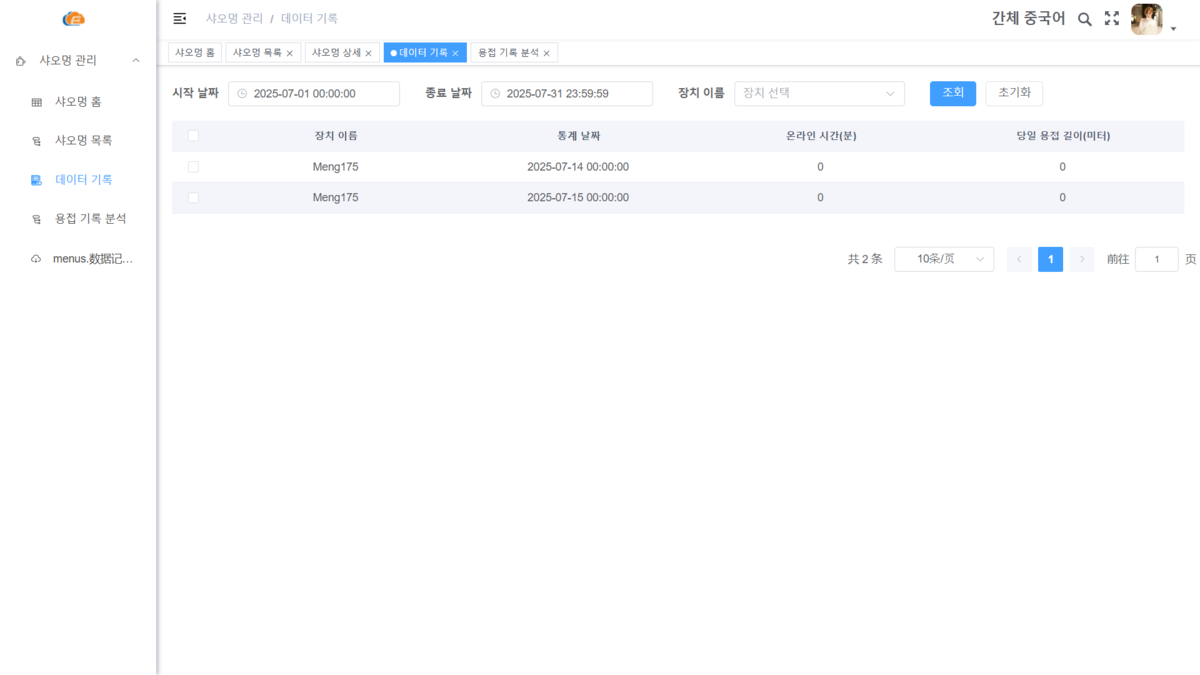
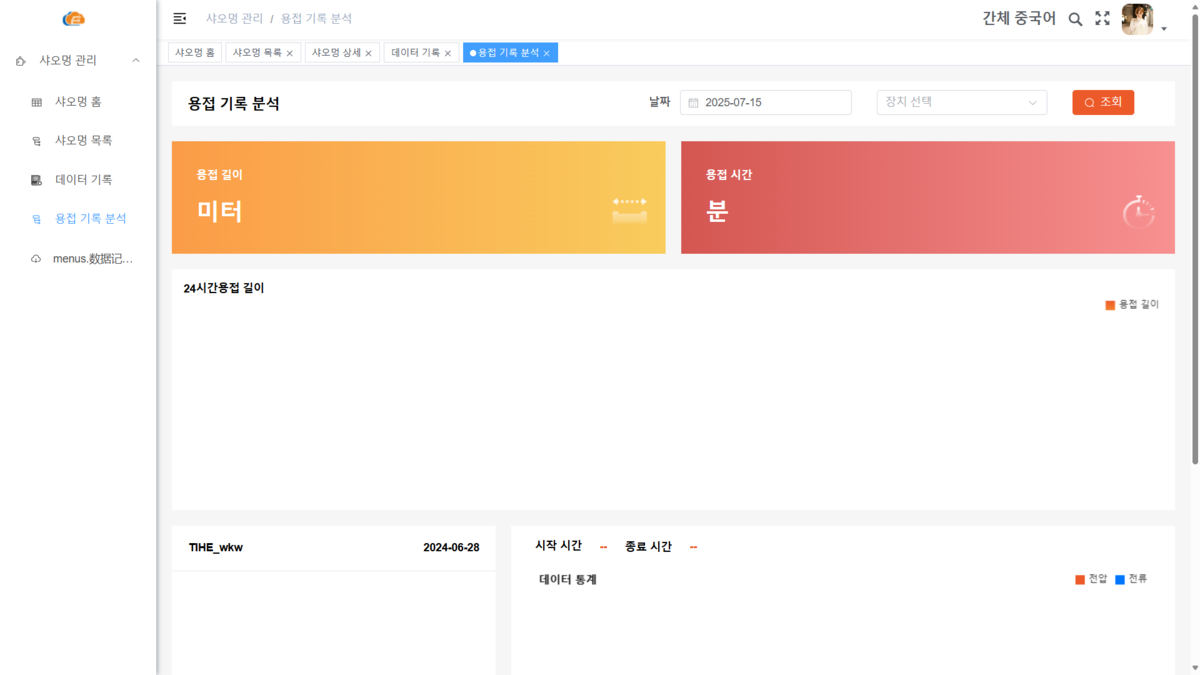
*데이터 기록, 분석을 통한 공정 최적화(SPC 통계 적용 가능)
*로봇마다 고유 넘버가 부여되며, 구매 후 사이트 정보 및 개별 아이디 제공
*현재 페이지 최하단 이미지(모니터링) 참고
3. 수냉식 토치 옵션으로 연속 작업 시 과열을 방지합니다.
*특히 8시간 이상 고전류 용접 환경에 강점 있음
4. 레이저 위치 지정 시스템으로 첫 번째 작업물의 티칭 프로그램을 이용, 후속 작업물에 동일한 용접을 반복 적용할 수 있어 프로그래밍을 줄이는 효과가 있습니다.
*작업물에 대한 메모리 접촉 센서의 터치를 통해 작업물의 실제 위치와 티칭 위치 간의 오차를 자동으로 찾아내고, 후속 용접 과정에서 이 오차를 보정함
5. 데이터 클라우드 스토리지 기능으로 용접 시의 전류, 전압, 용접 시간 및 길이를 저장할 수 있습니다.
6. 아크 추적 기능으로 진동 과정에서의 전류 변화를 기반으로 용접선을 추적합니다.
7. 경로 티칭이 완료된 후 공회전 기능으로 진입할 수 있으며, 로봇이 아크를 발생시키지 않고 경로만 따라 움직이면서 경로의 정확성을 빠르게 점검할 수 있습니다.
8. 로봇 암(arm)의 충돌 감지 기능으로 예기치 않은 상황이나 조작 실수 시 긴급 회피를 통해 설비 손상 및 사고를 최대한 방지합니다.
9. 원스톱 자동 토치 클리닝으로 용접 토치의 와이어 커팅, 인젝션, 청소 등 작업을 신속하게 완료할 수 있어, 작업 효율을 크게 향상시킵니다.
10. 유압 위치 지정 시스템으로 로봇의 안정성을 보장하여 용접 품질의 일관성을 유지합니다.
11. 리프팅 기능으로 더 넓은 용접 범위를 확장하여 용접 난이도를 낮추고, 용접 효율을 높이며 작업자의 위험을 줄입니다.
*해리어 only
■ 제품 장점
| 구분 | 내용 |
| 핵심 장점 | FANUC 기반의 이동형 용접로봇으로 복잡한 구조물에 자유롭게 접근, 고품질 용접을 자동화 |
| 고정밀 제어 | ±0.03mm 반복 정밀도, FANUC R-30iB Mate Plus 기반 정밀 제어 |
| 자동화 수준 | 자동 토치 클리닝, 접촉 감지, 아크 추적 등 풀 오토메이션 기능 제공 |
| 초보자 대응 | iPendant(터치 펜던트)로 직관적 조작, 초보자도 티칭 가능 |
| 고출력 용접기 | 500A 고출력 용접기 탑재 – 중후판 및 대형 구조물에 최적 |
| 용접기 사양 | PANASONIC 디지털 IGBT 제어 MIG/MAG 아크 용접 전원 모델 : YD-500FT3 (380V 사용) |
| 반복 작업 안정성 | 고정된 반복 작업에 대해 일관된 품질 확보 – 불량률 최소화 |
■ 제품 장점

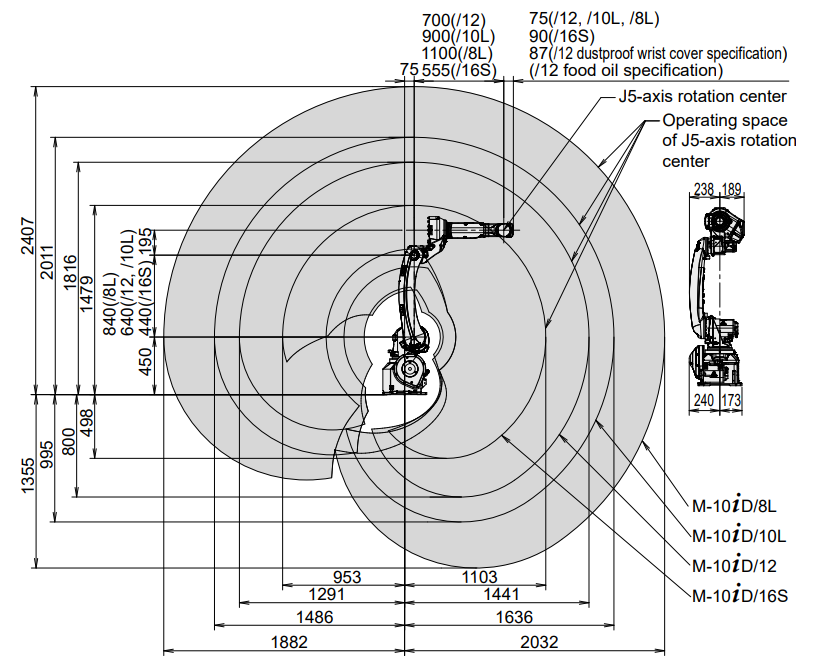
■ 로봇 암(arm) 매개 변수

| 구분 | 성능 특징 | ||
| 명칭 | FANUC M-10iD/8L | ||
| 구조 | 수직 멀티조인트 | ||
| 축 수 | 6 | ||
| 손목부 운반 가능 무게 | 8kg | ||
| 위치 반복 정밀도 | ±0.03mm | ||
| 도달 가능 반지름 | 2032mm | ||
| 설치 방식 | 바닥, 천장, 경사각 | ||
| 로봇 본체 무게 | 180kg | ||
| 동작 범위 | 기본 축 | J1 축(회전) | 340˚/370˚(옵션) |
| J2 축(전후) | 235˚ | ||
| J3 축(상하) | 455˚ | ||
| 암 축 | J4 축(회전) | 380˚ | |
| J5 축(진동) | 360˚ | ||
| J6 축(비틀림) | 900˚ | ||
| 최대 속도 | 기본 축 | J1 축(회전) | 5.93rad/s 6.46rad/s(옵션) |
| J2 축(전후) | 4.10rad/s | ||
| J3 축(상하) | 7.94rad/s | ||
| 암 축 | J4 축(회전) | 6.63rad/s | |
| J5 축(진동) | 6.28rad/s | ||
| J6 축(비틀림) | 15.71rad/s | ||
| 부하 용량 | 허용 토크 | J4 축(회전) | 16.1N·m |
| J5 축(진동) | 16.1N·m | ||
| J6 축(비틀림) | 5.9N·m | ||
| 허용 관성 모멘트 | J4 축(회전) | 0.63kg·m | |
| J5 축(진동) | 0.63kg·m | ||
| J6 축(비틀림) | 0.061kg·m | ||
■ 제어기(컨트롤 캐비닛) 정보
| 구분 | 내용 |
| 공급 전압 | AC200-230V+10%-15%, 50/60Hz±1Hz, 1-Phase/3-Phase |
| 무게 | 40kg |
| 제원(W*D*H) | 470*322*400 / 470*402*400 |
| IP등급 | IP54 |
| 비상 정지 | Emergency stop function PL=e, Cat4(ISO13849-1) SIL3(IEC61508) |
| Position/Speed check function PL=d, Cat3(ISO13849-1) SIL2(IEC61508) | |
| 외부저장 장치 | USB |
| 통신 사양 | Ethernet, FL-net, Devicenet, PROFIBUS, PROFINET, CC-Link, Ethernet/IP, EtherCAT |
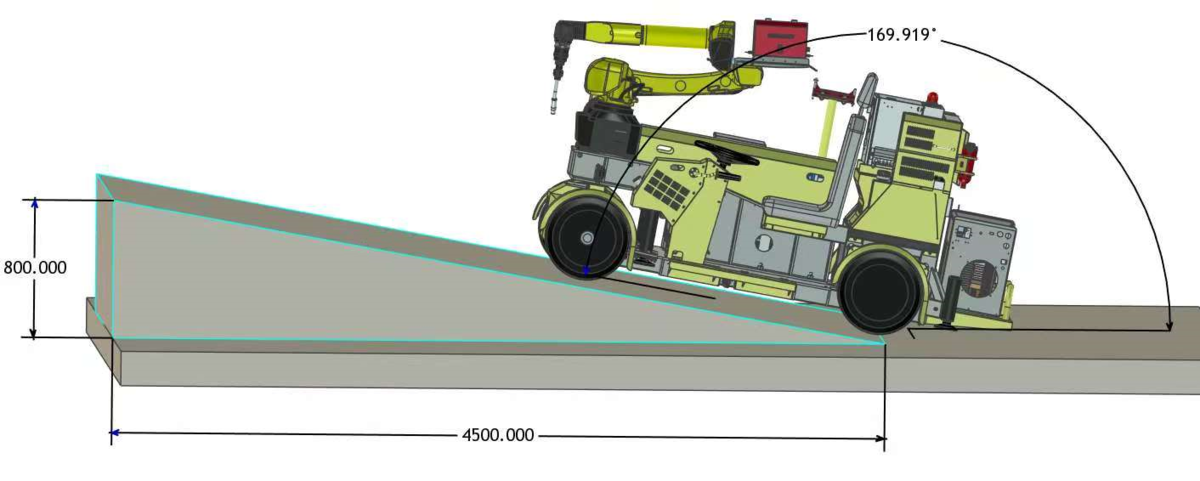
■ 등판 각도
■ 지원 사항
1. 자동화 솔루션 컨설팅
공정 자동화 진단 및 로봇 도입 제안
2. 바우처 연결
필요시 정부 지자체, 관공서 등 바우처 및 컨설팅 연결
3. 기술 교육
선택1. 사용자 해외연수(중국 현지 교육 10일)
* 중국 현지 교육 시 항공, 숙박, 교육 등 전액 엑스엠코리아(주) 지원
선택2.사용자 작업장으로 중국 기술개발자(엔지니어) 파견 교육 5일
* 파견 교육 시 기술개발자(엔지니어) 숙식 별도
4. 설비 설치 및 시운전
고객 환경에 맞는 설치 및 초기 세팅 지원
5. 초기 소모품 지원
주요 소모품 제공 / 계약서 상세사항 명시
6. 유지 보수
지속적인 정기 점검 서비스 제공
■ ROI 분석 정보
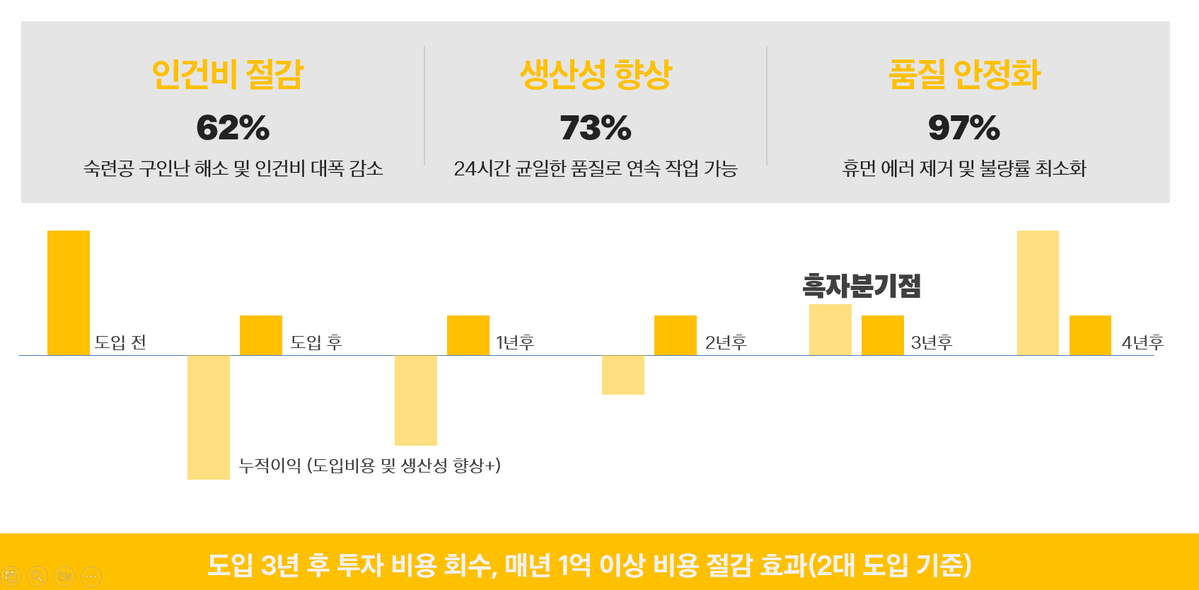
*자세한 사항은 상담 시 문의
■ 모니터링 시스템 이미지